


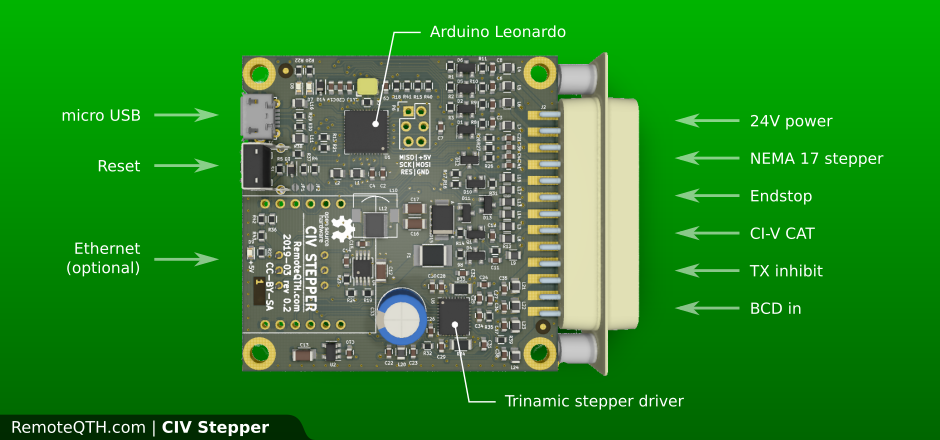
Icom CI-V (or MQTT) stepper driver
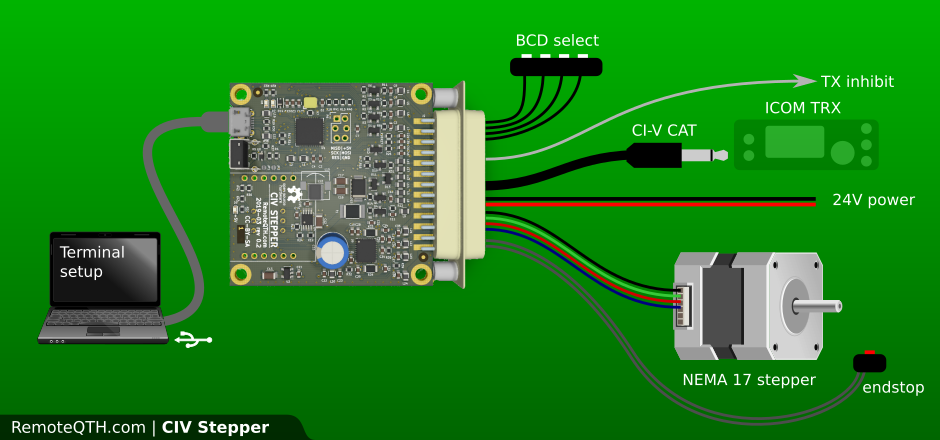
Automatic rotate move with NEMA 17 stepper motor dependency to transceiver frequency read from ICOM CI-V CAT protocol.
MQTT optional variant need install wiznet ethernet module and use another firmware.

Main functions:
- Control stepper Nema 17 by received frequency from Icom CI-V protocol
- Support endstop for adjusting after start up
- Without endstop available save lat position to eeprom (not recomended)
- Configure via serial USB Command Line Interface (CLI)
- TX inhibit output during stepper operate
- Up to 112 frequency memory
- Up to 16 stepper counter memory for each frequency, selected by BCD inputs
- Linear iterpolation on/off adjustable in CLI
- Reverse on/off adjustable in CLI
- Running/tuning mode in CLI
- Wizard for save to eeprom memory in CLI
- 24V DC power supply
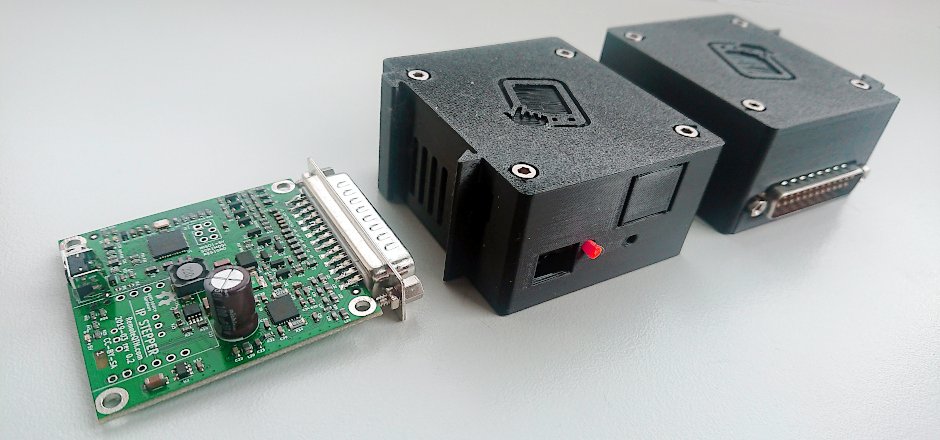
- 3D printed box available to DIN rail mount
CLI in PuTTY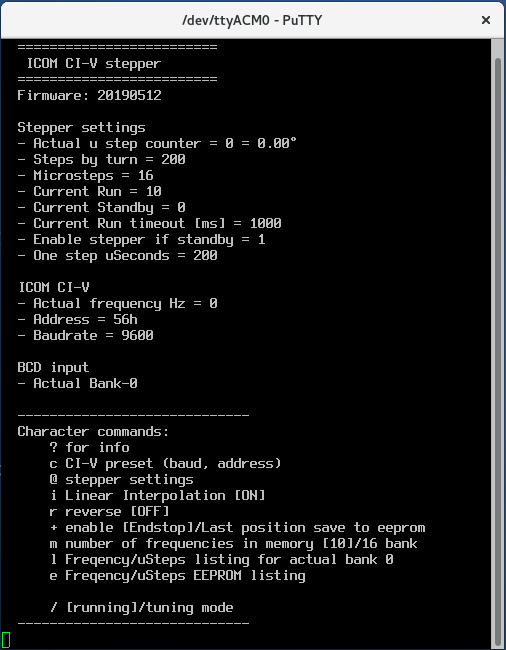 |
Linear Interpolation OFF/ON |
Download
| PCB | ||||
|---|---|---|---|---|
| 4 layer | sch  |
Interactive BOM | kicad191 | |
| 3D print | ||||
| PCB enclosure | .SCAD174 |  3D preview 3D preview |
box.STL [1.7 MB]331 | |
| 3D preview |
top.STL [806 kB]264 | |||
| 3D preview |
butt.STL [71 kB]296 | |||
| Arduino firmware | ||||
| CI-V stepper | GitHub | wiki | ||
| MQTT stepper | GitHub | wiki | ||
 Open-Hardware Open-Hardware
|

|
|||
|
We believe open source is a better way of doing things. View and download the Shield Schematic and PCB Kicad/Eagle CAD files, LibreCAD .DXF, or Inkscape .SVG files. The hardware designs are released under the Creative Commons Attribution-ShareAlike 4.0 International License |
||||



{kind=link}
{kind=link}